Física
Clásica, relativista y cuántica
Eduardo Ochoa Hernández
Nicolás Zamudio Hernández
Filo Enrique Borjas García
Rogelio Ochoa Barragán

Capítulo I.
Determinar fuerzas de cuerpos en reposo
Tal vez Newton, en mayor medida que cualquier otro científico, fuera quien inculcó a los científicos posteriores la idea de que el universo se podía comprender en términos matemáticos. El periodista James Gleick ha escrito que “Isaac Newton nació en un mundo de tinieblas, oscuridad y magia [...] estuvo al menos una vez al borde de la locura […] y sin embargo, descubrió más facetas del núcleo esencial del conocimiento humano que cualquier otro antes o después de él. Fue el principal arquitecto del mundo moderno […] Convirtió al conocimiento en algo sustantivo: cuantitativo y exacto. Formuló principios que nosotros llamamos “leyes”.
Newton es ante todo inspiración en palabras de Stephen Hawking .
Clifford A. Pickover (2012) The phisics book. Nueva York: Holanda
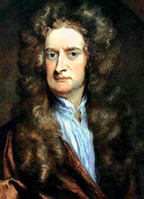
1.1 Newton
Isaac Newton (1642-1727), físico y filósofo británico creador de los conceptos de la mecánica clásica, el cálculo infinitesimal y de la teoría de la gravitación universal entre los muchos aportes que realizó a la humanidad. Fue presidente de la Royal Society, una de las sociedades científicas más importantes del mundo[1]. Resulta sorprendente la influencia intelectual de sus innovaciones en el cálculo matemático y física óptica[2] (actualmente se encuentran disponibles en línea copias digitales de sus documentos en la Universidad de Cambridge[3]). Hijo de un agricultor analfabeto de nombre Isaac Newton y madre Hannah Ayscough oriundos de Woolsthorpe, Lincolnshire. Su padre muere en octubre de 1642 e Isaac Newton hijo nace tres meses después el 25 de diciembre de 1642, su madre se volvió a casar con Barnabas Smith (1646) y la abuela materna Margery Ayscough fue clave para su formación básica. Ese tiempo es recordado por la muerte de Galileo Galilei y el estallamiento de la guerra civil inglesa.

En 1645 termina la guerra civil inglesa, 1648 también termina la guerra de los treinta años en Europa del Norte, en 1649 Inglaterra se convierte en república, en 1650 muere René Descartes, 1651 Thomas Hobbes publica Leviathan. Barnabas Smith muere en 1653. Es en 1654 cuando Newton se matriculó en la King’s School en Grantham, donde un boticario de la ciudad lo motivó por la química, es recordado como un estudiante que pasó de menos a ser destacado de su clase, ese año se publica The Marrow of Alchemy por George Ripley[4]. En 1658 deja la escuela y es convencido por el profesor Henry Stokes que regrese a la escuela de Grantham. En 1660 la Fundación de la Real Sociedad (Foundation of the Royal Society) publica los nuevos experimentos de física mecánica y en 1661 Sceptical Chymist de Robert Boyle. Sufre Newton una crisis religiosa en 1662 creando su lista de pecados: robar mazorcas a Eduard Storer, amenazar a sus padres, desear la muerte a algunos individuos. En 1663 conoce en Cambridge al que sería su asistente John Wickins. En 1664 se cree que asiste a las conferencias de matemáticas dadas por Isaac Barrow, titular de la Cátedra Lucasiana recién instituida en Matemáticas. Se dedica a los estudios específicos en matemáticas y óptica, ignorando en gran medida el currículo oficial de la universidad de los clásicos, la geometría euclidiana y la filosofía aristotélica. Comienza a llenar su libreta universitaria de una serie de entradas científicas de gran alcance titulado «Quaestiones quaedam Philosophiæ”, y Boyle publicó Touching Colours; nace el matemático suizo Nicolas Fatio de Duillier quien sería uno de sus mejores amigos. Para 1667 de manera autodidacta crea el cálculo diferencial e integral, que Newton llamó método de series y fluxiones, además, surge en él la inquietud por explicar la fuerza necesaria para mantener la luna en órbita alrededor de la Tierra, influenciado por Kepler. Escribe ecuaciones de series infinitas en 1669, y es instado por Barrow a que publique sus trabajos, en 1671 presenta a la Real Sociedad sus escritos de método de series y fluxiones que será publicado hasta 1736. 1672 publica Newton su teoría de la luz y los colores, provocando críticas que indignan a Newton y comienza así una feroz lucha con Robert Hooke. En 1676 Leibniz visita Londres y presenta su desarrollo independiente sobre los fundamentos del cálculo (publicado en 1678) y en 1677 muere Isaac Barrow. En 1686 formula su teoría de la gravitación universal: cada objeto en el universo atrae y es atraído a todos los demás objetos. Ya para 1689 Newton era una celebridad intelectual y hace amistad con el filósofo John Locke, en una carta famosa de Newton escrita a Locke confiesa que sus descubrimientos fueron basados en conocimiento de sabiduría antigua. En 1691 muere Robert Boyle y en 1703 Locke. En 1712 a petición de Leibniz, se revisa por un comité la historia controvertida del cálculo que implicaba a Newton con plagio. En respuesta en 1713 Newton publica su segunda edición de Principia, reconociendo bajo el tono de referencia extirpada, en el prefacio se menciona a Leibniz como un reptil miserable, en la misma obra se añade escolio general, para establecer la relación entre Dios y la creación de Newton. En 1726 se publicó la tercera edición de Principia y en 1727 preside su última reunión en la Royal Society el 19 de febrero y el 2 de marzo. Poco después cae en cama, sufriendo de una nueva piedra en la vejiga. Muere, tras haber negado la extremaunción, en marzo de 1727.
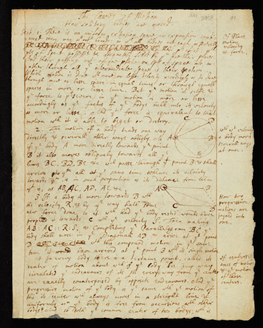
Fig. 1.1 Isaac Newton (c 1665 - c 1672) The Lawes of Motion[5].
Las leyes del movimiento de Newton, tienen fundamentos que explican los problemas relativos al movimiento de los cuerpos. También esta física es conocida como física clásica o newtoniana, en palabras de Newton[6]:
“Hay una extensión uniforme, espacio o expansión continua de todos los sentidos y sin límites: en el que todos los cuerpos son, cada una de las partes de él, las partes del espacio que posee son llenadas por ellos en sus lugares. Y su paso de un lugar o de una parte del espacio a otro, a través de todo el espacio intermedio es su movimiento […] la fuerza es equivalente al movimiento de engendrar o destruir”.
Newton considera que un cuerpo en reposo y un cuerpo en movimiento con velocidad constante distinta de cero no se distingue en ellos diferencia, esto es consecuencia del sistema de referencia. De esta manera a un cuerpo que no se le aplica ninguna fuerza dentro de un sistema de referencia con aceleración cero, es un sistema de referencia inercial. Las leyes de Newton solo son válidas en estos sistemas de referencia inercial (sistema de referencia en reposo o en movimiento rectilíneo uniforme). En palabras de Newton él alcanzó a ver más lejos que otros por que se apoyó a hombros de gigantes.
“Constituyen los cimientos no solo de la dinámica clásica sino también de la física clásica en general. Aunque incluye ciertas definiciones y en cierto sentido pueden verse como axiomas, Newton afirmó que estaban basadas en observaciones y experimentos cuantitativos; ciertamente no pueden derivarse a partir de otras relaciones más básicas. La demostración de su validez radica en sus predicciones... La validez de esas predicciones fue verificada en todos y cada uno de los casos durante más de dos siglos[7]” pag. 133
La primera ley de Newton se publicó en Philosophiae Naturalis Principia Mathematica[8]. Primera ley de Newton: “Todo cuerpo permanece en su estado de reposo o de movimiento rectilíneo uniforme a menos que sea obligado a cambiar ese estado por fuerzas que actúan sobre él. En ambas circunstancias, se dice que el cuerpo está en un estado de equilibrio mecánico. A esta tendencia de los cuerpos a resistir cambios en su movimiento se le llama inercia, asociada a la masa del cuerpo[9]”. Es decir, un cuerpo en reposo permanece en reposo y un cuerpo en movimiento uniforme se mantiene en movimiento uniforme a menos que actúe sobre él una fuerza de desequilibrio exterior. La inercia es la magnitud de resistencia al cambio de velocidad de un cuerpo.
Esta ley es válida si los experimentos de la mecánica son a velocidades muy bajas respecto de la luz, pero en caso contrario puede requerir formulaciones más sofisticadas, como la relatividad especial, la relatividad general o la mecánica cuántica relativista, a grandes velocidades, o con fuertes campos gravitatorios.
Segunda ley de Newton: La aceleración de un objeto tiene la misma dirección que la fuerza externa total que actúa sobre él. La fuerza es directamente proporcional al producto de masa por la aceleración.

El conocimiento práctico que tenemos respecto a la experiencia del movimiento de un cuerpo en un sistema de referencia inercial, despreciando matemáticamente sus efectos relativistas, nos reafirman que la proposición de Newton  es aceptable su predictibilidad con cálculos en un sistema de referencia rectangular. La teoría de Newton sobre el movimiento mecánico es eficiente bajo estas consideraciones. Pero cuando el cuerpo a estudiar es una partícula relativamente pequeña moviéndose a gran velocidad, requerimos otra física, Hamilton es quien al igual que Newton por experimentación deduce el principio de mínima acción para partículas en estado de movimiento como un campo físico, es decir, la evolución en el tiempo de todo sistema físico requería una cantidad de acción con una tendencia mínima posible. Las ecuaciones para este sistema de movimiento entre dos tiempos t1 y t2, describen pequeñas variaciones virtuales del movimiento respecto al real. El principio de Hamilton expresa cuál de todas las trayectorias q(t) es la real, a partir de una ecuación lagrangiana, consiste en admitir que las partes de un sistema que no interactúan con otras no pueden contener magnitudes pertenecientes a esas otras.
es aceptable su predictibilidad con cálculos en un sistema de referencia rectangular. La teoría de Newton sobre el movimiento mecánico es eficiente bajo estas consideraciones. Pero cuando el cuerpo a estudiar es una partícula relativamente pequeña moviéndose a gran velocidad, requerimos otra física, Hamilton es quien al igual que Newton por experimentación deduce el principio de mínima acción para partículas en estado de movimiento como un campo físico, es decir, la evolución en el tiempo de todo sistema físico requería una cantidad de acción con una tendencia mínima posible. Las ecuaciones para este sistema de movimiento entre dos tiempos t1 y t2, describen pequeñas variaciones virtuales del movimiento respecto al real. El principio de Hamilton expresa cuál de todas las trayectorias q(t) es la real, a partir de una ecuación lagrangiana, consiste en admitir que las partes de un sistema que no interactúan con otras no pueden contener magnitudes pertenecientes a esas otras.

La física mecánica se interesa por explicar analíticamente a partir de las causas (fuerzas) en términos matemáticos el movimiento de los cuerpos, al predecir su comportamiento tendríamos que superar su reducción de verlo solo en términos geométricos, tal como lo hicieron Aristóteles, Euclides, Pitágoras, Copérnico, Kepler, Galileo, hasta que todo cambió con la magia de la imaginación creativa de Newton.
Para Newton el movimiento geométrico no es el de un punto geométrico, sino el de un punto material llamado partícula en función vectorial respecto del tiempo. Para Newton al igual que para Galileo el parámetro tiempo es absoluto, es decir, inmutable entre sistemas inerciales. Los estados de movimiento del modelo de Newton por su estructura evolucionan en términos de instantes de tiempo proyectados sobre ejes cartesianos de referencia, para la posición x(t), la velocidad v(t), y la aceleración a(t). Estos dos últimos conceptos v(t) y a(t) son vectores que responden a que no sea imperioso conocer la partida de las variaciones temporales de orden arbitrariamente alto de las funciones coordenadas, bastando con tener conocimiento de condiciones iniciales y finales de la partícula para modelar el movimiento completo. Para la consistencia de este modelo, fuerza y aceleración se vinculan con la idea material de punto, con la masa inercial m. F=ma, la fuerza sobre una partícula es el producto de su masa inercial por la aceleración de la misma. La fuerza que ejerce una partícula sobre otra partícula representa para las ecuaciones de movimiento una innovación, es esa fuerza en magnitud igual entre las partículas, y opuesta en dirección a la fuerza recíproca.

Es claro que la primera ley es deducida de la segunda ley, y que la tercera ley de Newton es para un sistema que converge en la primera ley para expresar un cuerpo estático como la suma nulificada de todas las fuerzas, no la ausencia de ellas en el sistema. La masa inercial no la debemos confundir con la masa gravitatoria de la ley de la gravitación universal:

Donde es el vector unitario que une los centros de las partículas de masa  a
a  .
.
La practicidad de las ecuaciones de Newton para un sistema mecánico es asombrosa, sin embargo, para cuando el sistema está dado por funciones de coordenadas y velocidades que se mantienen en un campo constante en el curso de su evolución, resulta mejor expresarlo en términos de cantidades conservadas, como el momento lineal y angular. El momento lineal de un punto material es el producto de su masa por su velocidad:

Esta visión escapa al alcance de este libro, solo agregaremos que con este concepto de física los campos son algo que está distribuido en todo el espacio (temperatura, electromagnetismo, gravedad) y la partícula es un efecto del campo en una región del espacio. Así la ecuación de Newton podría expresarse como:

La traducción del texto original de las leyes de Newton por Stephen Hawking[10]:
Ley I
“Todo cuerpo se preserva en su estado de reposo o movimiento uniforme y rectilíneo a no ser en tanto que sea obligado por fuerzas impresas a cambiar su estado” (pág. 659).
Ley II
“El cambio de movimiento es proporcional a la fuerza motriz impresa y ocurre según la línea recta a lo largo de la cual aquella fuerza se imprime” (pág. 659).
Ley III
“Con toda acción ocurre siempre una reacción igual y contraria: es decir, las acciones mutuas de dos cuerpos siempre son iguales y dirigidas en direcciones opuestas” (pág. 660).
Isaac Newton nos legó además de su asombrosa matematización de la realidad fáctica, la enseñanza del honor de crecer en la ciencia reconociendo la obra de todos los que nos preceden a nuestro tiempo, aprender física es reflexionar explorando todos los caminos de la razón y la experimentación.
Nota: La masa inercial estará dada en kilogramos, la fuerza en N (Newtons), es la fuerza necesaria para 1 m/s2 de aceleración).
Las fuerzas fundamentales del universo son cinco:
Fuerza oscura. Fuerza responsable de la expansión del universo.
Fuerza nuclear fuerte. Fuerza de pegamento de las partículas subatómicas.
Fuerza nuclear débil. Fuerza de decaimiento radiactivo.
Fuerza electromagnética. Fuerza de afinidad o repulsión entre cargas.
Fuerza gravitacional. Fuerza de atracción reciproca entre masas.
1.2 Equilibrio traslacional
El equilibrio traslacional es que un cuerpo físico no tiene fuerza resultante actuando en él, es decir, la suma de los componentes en el x o y son igual a cero, en otras palabras la suma vectorial de las fuerzas que actúan sobre el cuerpo son igual a cero.
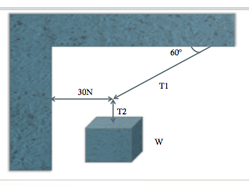
Ejemplo 1: Calcular la tensión en los cables de una caja de 10.20 kg sostenida de un techo (se desprecia el peso de los cables).
 13.52.01.png)
Solución:
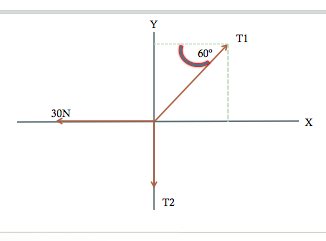
a) Diagrama de cuerpo libre
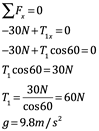
b) Descomponemos las fuerzas en sus componentes vectoriales.
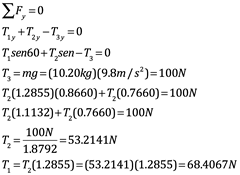
Nota: T1>T2 porque es más vertical T1 que T2, T1+T2> 100 N por la fuerza adicional de los cables que jalan de derecha a izquierda.
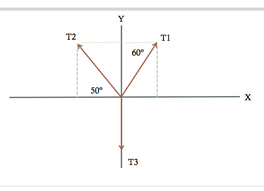
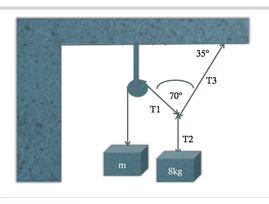
Ejemplo 2: Calcular las tensiones y la masa desconocida del sistema de equilibrio.
Solución:
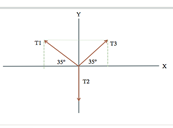
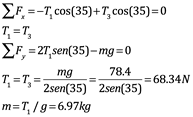
a) Diagrama de cuerpo libre
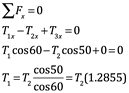
b) Cálculo de equilibrio
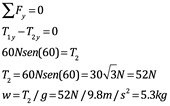
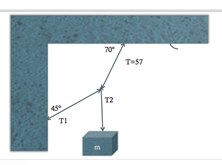
Ejemplo 3: Calcular las tensiones y la masa desconocida del sistema de equilibrio.
Solución:
a) Diagrama de cuerpo libre
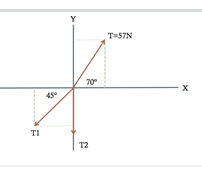
b) Cálculo de equilibrio
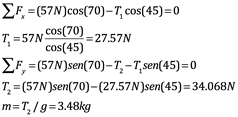
Ejemplo 4: Calcular las tensiones y la masa desconocida del sistema de equilibrio.
Solución:
a) Diagrama de cuerpo libre
b) Cálculo de equilibrio
1.3 Equilibrio rotacional
Cuando nos referimos a la noción de móvil, es el concepto introducido por el escultor Alexander Calder. Entiéndase por móvil a un modelo de piezas giradas por motores o por fuerzas naturales como el viento. El equilibrio en un móvil, es el equilibrio rotacional,que implica que la suma de todas las fuerzas externas aplicadas al móvil son cero. Torsión es esa fuerza que tiende a producir rotación sobre un eje del objeto móvil.
Newton construyó un modelo gravitacional para explicar el movimiento de los planetas en función de fuerzas de naturaleza gravitatoria que son inversamente proporcionales al cuadrado de la distancia que describe un movimiento en órbitas elípticas, argumentó que fue vigente, hasta que Einstein propuso su modelo de espacio tiempo curvo, pero ambos dejaron el debate abierto sobre las propiedades de las causas últimas de estos efectos. Sin embargo, el modelo de Newton permite anticipar, al grado de predecir la existencia teórica del planeta Neptuno, mucho antes de su observación empírica. Así surge históricamente el concepto de torque.
Par fuerza. Es la capacidad de una fuerza para causar que un cuerpo gire alrededor de un eje particular.
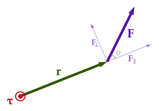
Donde F actúa sobre el punto del vector posición r, el objeto se hace pivotar sobre el punto de origen (0,0). La magnitud del par causado por F sobre el eje origen es:

Donde  es el brazo de la palanca de la fuerza, es esa distancia perpendicular desde la línea de fuera que aplica la fuerza al eje en el origen, bien podría tratarse de los siguientes casos de un martillo y levantamiento de pesas.
es el brazo de la palanca de la fuerza, es esa distancia perpendicular desde la línea de fuera que aplica la fuerza al eje en el origen, bien podría tratarse de los siguientes casos de un martillo y levantamiento de pesas.

Donde  es el ángulo formado entre la línea de fuerza y el brazo de palanca. También podemos escribir el par como:
es el ángulo formado entre la línea de fuerza y el brazo de palanca. También podemos escribir el par como:

Donde  es el componente de la fuerza perpendicular a la línea de la palanca. Las unidades de torque son N m. El par se define positivo si tiende a rotar al objeto en sentido antihorario y negativo en caso de que gire en el sentido de las manecillas del reloj. Si sobre un cuerpo actúan mas fuerzas, el par total es la suma de los pares de torsión debidos a las fuerzas individuales.
es el componente de la fuerza perpendicular a la línea de la palanca. Las unidades de torque son N m. El par se define positivo si tiende a rotar al objeto en sentido antihorario y negativo en caso de que gire en el sentido de las manecillas del reloj. Si sobre un cuerpo actúan mas fuerzas, el par total es la suma de los pares de torsión debidos a las fuerzas individuales.

Asegúrese de respetar los signos, algunas fuerzas podrían restar al par final neto. En su forma vectorial el torque es el producto cruz:

Podemos deducir que el vector  , es un vector perpendicular al plano formado por r x F. Cuando el sistema está desequilibrado se produce un cambio en el momento angular del cuerpo. Es decir, el torque causa movimiento de rotación con aceleración angular
, es un vector perpendicular al plano formado por r x F. Cuando el sistema está desequilibrado se produce un cambio en el momento angular del cuerpo. Es decir, el torque causa movimiento de rotación con aceleración angular  :
:

Donde  es el momento de inercia del sistema y
es el momento de inercia del sistema y  es la aceleración angular. Es equivalente a la segunda ley de Newton:
es la aceleración angular. Es equivalente a la segunda ley de Newton:

Cuando el par neto es cero, el objeto no va a cambiar su estado de movimiento de rotación, es decir, no comenzará a girar, no dejará de girar ni cambiará la dirección de su rotación. Se dice que está en equilibrio de rotación. Si la suma de las fuerzas que actúan sobre el objeto también es cero, el objeto está en equilibrio de traslación y no cambia su estado de movimiento de traslación, es decir, no será acelerado o disminuido en la velocidad o cambio de su dirección de movimiento. Siempre que ambas condiciones se cumplan:

Si se cumplen estas condiciones, diremos que el cuerpo está en equilibrio estático.
El momento angular, momento de impulso o el impulso de rotación es un mensurando físico de rotación de un objeto, teniendo en cuenta su masa, forma y velocidad. Es un mesurando vectorial que representa el producto de inercia de rotación de un cuerpo y la velocidad de rotación alrededor de un eje particular. El momento angular de un sistema de partículas es la suma de los momentos angulares de las partículas individuales. Por ejemplo, para las aspas de un ventilador el momento angular se puede expresar como el producto del momento de inercia del cuerpo  (es decir, una medida de la resistencia de un cuerpo a cambiar en su velocidad de rotación), y su velocidad angular
(es decir, una medida de la resistencia de un cuerpo a cambiar en su velocidad de rotación), y su velocidad angular  .
.

De esta manera, el momento angular se describe a veces como el análogo de rotación del momento lineal  . Para los casos de objetos muy pequeños en comparación con la distancia radial a su eje de rotación, tal como un planeta que órbita en elipse alrededor del Sol o una pelota colgada a una larga cuerda, se puede expresar como su línea de impulso
. Para los casos de objetos muy pequeños en comparación con la distancia radial a su eje de rotación, tal como un planeta que órbita en elipse alrededor del Sol o una pelota colgada a una larga cuerda, se puede expresar como su línea de impulso  , atravesada por su posición desde el origen r. Por lo tanto, el momento angular L de una partícula con respecto a algún punto de origen es:
, atravesada por su posición desde el origen r. Por lo tanto, el momento angular L de una partícula con respecto a algún punto de origen es:

El momento angular o momento de torsión se conserva en un sistema donde no hay torque externo neto, y su conservación ayuda a explicar muchos fenómenos diversos. Por ejemplo, el aumento de la velocidad de rotación de una figura de un patinador cuando los brazos se contraen, es una consecuencia de la conservación del momento angular. Las altas tasas de rotación de las estrellas de neutrones también se pueden explicar en términos de la conservación del momento angular. Por otra parte, la conservación del momento angular tiene numerosas aplicaciones en la física y la ingeniería (por ejemplo, la brújula giroscópica). Donde  es el vector posición relativo a la partícula y al origen,
es el vector posición relativo a la partícula y al origen,  es el momento lineal de la partícula y L será su producto cruz. Para el caso de un sistema de partículas:
es el momento lineal de la partícula y L será su producto cruz. Para el caso de un sistema de partículas:
Para el caso de un planeta el momento angular se distribuye entre el giro del planeta en su propio eje y el momento angular de su órbita:

El centro de gravedad, es el centro de masa de una distribución de la masa en el espacio, es el único punto que la posición relativa ponderada de la suma de masas distribuidas es cero. La distribución de la masa se equilibra alrededor del centro de masa y de la media de la posición de las coordenadas ponderadas de la masa distribuida. Los cálculos de mecánica son a menudo simplificados cuando se formula con respecto al centro de la masa. Para un cuerpo rígido, el centro de masa se fija en relación con el cuerpo.
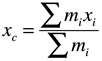
El centro de gravedad de una colección de masas es el punto en el que todo el peso del objeto puede ser considerado a concentrarse. Si p(x, y) son las coordenadas del punto de centro de gravedad de una colección de masas puntuales m1,m2, mn situadas en coordenadas:

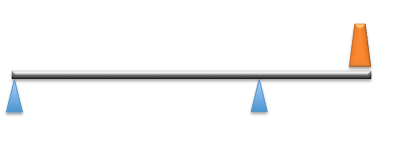
Ejemplo 5: Un balancín mal construido tiene un punto de apoyo de 2/3 del brazo horizontal a lo largo de su longitud. a) Si el balancín pesa 30 kg, ¿dónde se sentaría un niño de 20 kg para sentarse con el fin de equilibrar el balancín? b) ¿Cuál es el mínimo de masa que un niño debe tener a fin de equilibrar el balancín?
Solución:
El centro de gravedad del que sube y baja se supone que es en el centro, en el supuesto de que es uniforme su masa. Por tanto, el diagrama de fuerzas es como se muestra a continuación. Ms = 30 kg es la masa del balancín, Mn = 20 kg es la masa del niño, y L es la longitud del balancín.
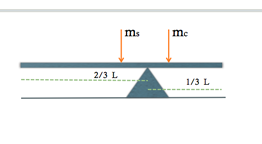
a) Con el fin de encontrar la distancia x desde el niño al punto de apoyo que podemos hacer un balance par sobre el punto de apoyo:
de modo que
b) Para encontrar la masa mínima del niño que iba a funcionar, suponemos que el niño tiene de masa mc y se sienta lo más a la izquierda como sea posible a fin de que:
lo que da
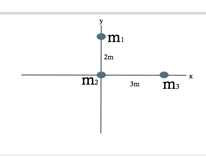
Ejemplo 6: Calcular P(xc,yc) posición del centro de gravedad de los siguientes tres objetos donde m1 = 1.0 kg, m2 = 2.5 kg y 4.0 kg = m3. De acuerdo al siguiente gráfico:


1.4 Problemario
- 1. Una caja con una masa de 5 Kg es arrastrada por un plano horizontal, la fuerza que se le aplica es de 15 N. Calcular la aceleración de la caja.
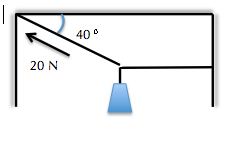
- 2. Calcular la tensión en el cable que forma parte del sistema, que sostiene una masa de 2 Kg, ver el diagrama siguiente.
 17.27.14.png)
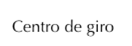
- 3. En un balancín se encuentran jugando dos niños, uno de ellos ejerce un peso de 500 N, mientras que el otro un peso de 450 N, si suponemos que el balancín tiene una distancia de 5 metros de largo y pesa 200 N y además sabemos que el niño de 500 N de peso se encuentra sentado a 2 metros del punto de equilibrio del balancín, a que distancia se debe colocar el niño de 450 N de peso para que el sistema quede en equilibrio.
1.5 Autoevaluación
- 1. Calcular la fuerza F con la que se arrastra una caja de masa igual a 2 Kg sobre un plano horizontal a una aceleración de 0.5 M/s2.
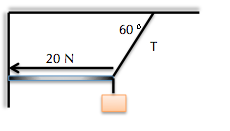
- 2. Calcular la tensión T en el cable del sistema de una caja de 1.5 kg sostenida de acuerdo al diagrama (se desprecia el peso del cable).
- 3. Calcular la tensión en el cable y la masa desconocida del sistema en equilibrio
- 4. Se tiene una barra de 5 metros de largo y masa =20000 N, apoyada en uno de sus extremos y a 4 metros de este; calcular el peso máximo que se puede apoyar en el extremo opuesto a los apoyos sin que gire la barra (según el diagrama).
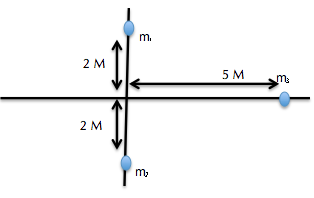
- 5. Calcular el centro de gravedad de los siguientes objetos si las masas m1= 2 Kg; m2= 3 Kg y m3 = 2 Kg. Considerando el siguiente gráfico:
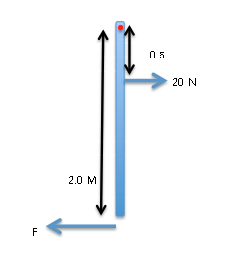
- 6. Calcular la fuerza F, que se aplica en el sistema en equilibrio del siguiente gráfico.
1.6 Soluciones del problemario
1. Para resolver este problema primero debemos de considerar la fórmula para conocer la Fuerza que de acuerdo a la 2ª ley de Newton:

Donde F= Fuerza (Newtons [kg m/s2]), m = masa (Kilogramos) y a = aceleración (m/s2).
= aceleración (m/s2).
Despejando 
a = 3 m/s2
2. Para resolver este problema primero debemos presentar el diagrama de cuerpo libre.
 17.32.56.png)
 = 19.62 N
= 19.62 N
Sumando todas las fuerzas a lo largo del eje de las x(negritas) tenemos:
 =23.094 N
=23.094 N
Sumando todas las fuerzas a lo largo del eje de las y tenemos
 N
N
Aplicando el teorema de Pitágoras
 25.167 N
25.167 N
3. Para solucionar este problema debemos de comprenderlo.
La primera condición de equilibrio del sistema nos indica que la suma vectorial de todas las fuerzas que actúan sobre el balancín debe de ser igual a cero, es decir, la suma de los momentos del sistema debe ser igual a cero.
Así tenemos M1 = M2; pero como el momento es igual a la masa por la distancia tenemos que;


De donde x =  ; = (500 N)(2M) / (450 N) tenemos que la distancia donde debe de colocarse el niño para que el sistema este balanceado es de 2.22 M.
; = (500 N)(2M) / (450 N) tenemos que la distancia donde debe de colocarse el niño para que el sistema este balanceado es de 2.22 M.
1.7 Soluciones de la autoevaluación
- 1 N
- T = 24.85 N
- T = 12.85 N, m = 1.5617 Kg
- 30,000 N
- Xc = 1.43 M, Yc =0.2857 M
- 5 N
1.8 Conclusiones
En la búsqueda de explicar los fenómenos naturales muchos científicos han dedicado parte de su vida a observar, tratar de explicar y justificar muchos fenómenos. El encontrar explicaciones que satisfagan la curiosidad humana, que permita mejorar la vida cotidiana, llegar a lugares impensables en otras épocas, ha modificado el pensamiento del ser humano y la historia se ha ido escribiendo a la par de avances científicos y tecnológicos.
Te invitamos a conocer la vida y obra de este y otros científicos, esperando encuentres la inspiración para seguir profundizando en la física, ciencia que día a día brinda nuevas aportaciones.
URL:
http://en.wikipedia.org/wiki/Center_of_Grav
http://theory.uwinnipeg.ca/physics/rot/node2.html#SECTION00810000000000000000
http://www.fisicafundamental.net/index.html
http://estudiarfisica.wordpress.com
http://es.scribd.com/doc/36421033/Soluciones-Fisica-Tipler-Mosca-5a-Edicion-Completo-V1
[1] Iliffe, Robert (2014) The Newton proyect. Universidad of Sussex. Consulta: 12 de marzo de 2014, de http://www.newtonproject.sussex.ac.uk/prism.php?id=20
[2] Iliffe, Robert. "Sir Isaac Newton". The Literary Encyclopedia. First published 14 May 2005 Consulta: 12 de marzo de 2014, de http://www.litencyc.com/php/speople.php?rec=true&UID=3331
[3] Newton papers. Cambridge digital library. Consulta: 12 de marzo de 2014, de http://cudl.lib.cam.ac.uk/collections/newton
[4] Ripley, George (1655) The Marrow of Alchemy. Eirenaeus Philoponos Philalethes Consulta: 12 de marzo de 2014, de http://es.scribd.com/doc/139913205/THE-MARROW-OF-ALCHEMY-BY-PHILALETHES
[5] Early Papers Isaac Newton http://cudl.lib.cam.ac.uk/view/MS-ADD-03958/157
[6] Isaac Newton(c 1665 - c 1672) The Lawes of Motion MS Add. 3958.5, ff. 81r-83v, Cambridge University Library, Cambridge, UK
[7] Clifford A. Pickover (2008) De Arquímedes a Hawking. Barcelona: Crítica
[8] Isaac Newton Philosophiae Naturalis Principia Mathematica. (Cambridge: 1713) http://www.newtonproject.sussex.ac.uk/catalogue/record/NATP00072
[9] Arrayas Manuel (2007) Electromagnetismo, circuitos y semiconductores. Dykinson Google Book
[10] Hawking Stephen (2010) A hombros de gigantes. Barcelona: Crítica